Research and Development
Project Anchor
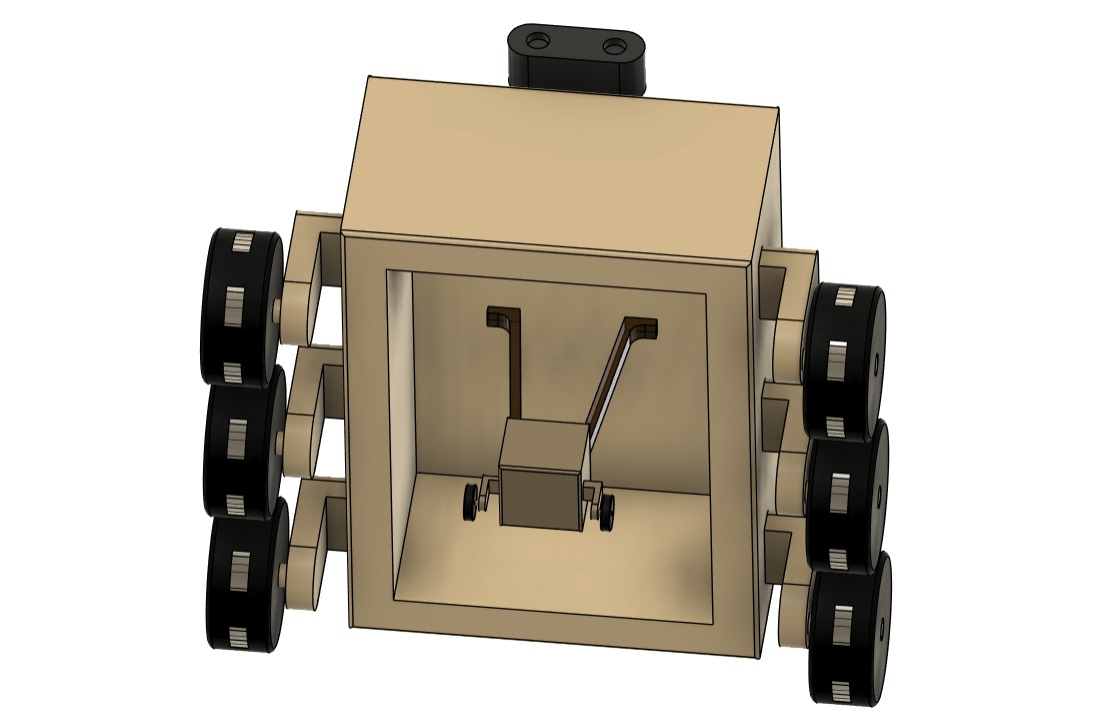
Inverted robotic platform for subsurface structural diagnostics.
Designed for soffit-level access and integrated ground penetrating radar inspection. Anchor navigates overhead structural surfaces to deliver repeatable, close-range sensor data in environments that are inaccessible to conventional inspection teams.
Research and Development
Project Vyuh
Distributed robotic sensing architecture for large-scale structural assessment.
A swarm-based inspection framework designed for scalable condition monitoring and coordinated data fusion. Multiple robotic agents collaborate to build comprehensive structural datasets across large infrastructure surfaces.







